WAGO Kontakttechnik GmbH & Co. KG
Kontakt am KI-Fortschrittszentrum
Werner Kraus
APT – Artificial Physics Teacher
Ausgangssituation
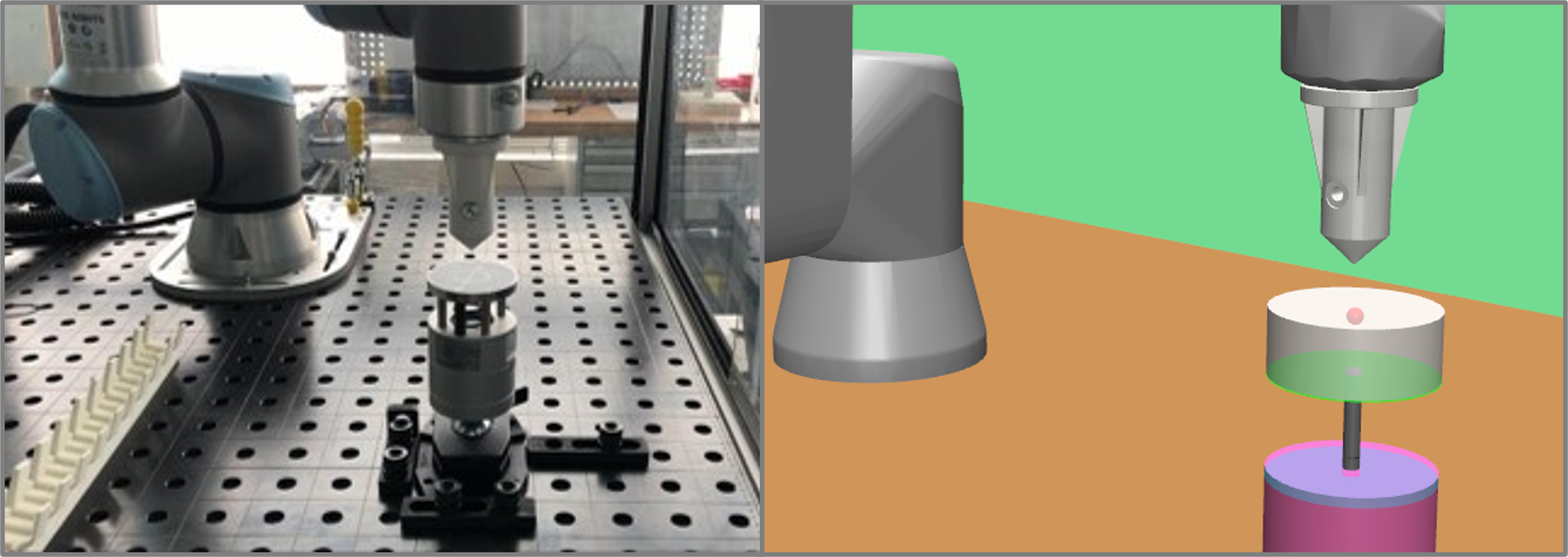
Physiksimulationen werden vermehrt eingesetzt, um Roboter in einer sicheren, digitalen Umgebung für Produktionsprozesse zu programmieren oder zu trainieren. Damit der Roboter die Prozesse erfolgreich erlernen kann, müssen die in der Simulation erzeugten Trainingsdaten den realen Prozess repräsentieren können. Andernfalls kommt es zu Abweichungen beim Transfer von der Simulation in die Realität (Sim2Real Gap), sodass der Roboter bei der Ausführung in der Realität scheitert. Um die Qualität der simulativ generierten Daten zu verbessern, können die Physikparameter der Simulation optimiert werden, ein aktuell komplexer, zeitaufwändiger und manueller Prozess.
Lösungsidee
Neuronale Netze eignen sich sehr gut, um selbst komplexe Zusammenhänge modellieren zu können, so auch den Einfluss der Physikparameter auf die Datenqualität. Durch den Vergleich mit Daten aus realen, roboter-basierten Prozessen, können neuronale Netze mittels Supervised Learning trainiert werden, die passenden Physikparameter für die Simulation von Produktionsprozessen zu ermitteln. Anschließend können die neuronalen Netze prozessabhängig passende Parameter der Physiksimulation approximieren, wodurch die Simulation optimiert und die Datenqualität deutlich verbessert wird.
Nutzen
Bislang findet die Optimierung der Parameter für die Physiksimulation rein manuell statt, setzt umfangreiches Experten- wissen voraus und ist äußerst zeitintensiv. Durch das Training neuronaler Netze für die Auswahl der optimalen Physikparameter wird die Datenqualität deutlich gesteigert sowie der manuelle Aufwand minimiert. Dadurch wird insbesondere die Abweichung zwischen Simulation und Realität (Sim2Real Gap) verringert. In der Simulation trainierte Roboter werden nachfolgend befähigt, die erlernten Produktionsprozesse auch in der Realität besser ausführen zu können. Qualitative Simulationsergebnisse können zudem direkt in die Entwicklung und Konstruktion neuer Bauteile einfließen.
Umsetzung der KI-Applikation
Für das Training der neuronalen Netze werden zunächst repräsentative Trainingsdaten sowohl aus physischen Experimenten am realen Roboter als auch aus der Ühysiksimulation heraus erzeugt. Für die Simulationsexperimente werden entsprechend die zu betrachtenden Parameter variiert, um deren Einfluss auf das Simulationsergebnis zu erfassen. In einem nächsten Schritt werden die Daten realer und simulierter Daten miteinander verglichen und dem Training zugeführt. Die neuronalen Netze werden anschließend darauf trainiert, basierend auf der ermittelten Abweichung der Daten die geeignetsten Simulationsparameter zu bestimmen.