Kontakt am KI-Fortschrittszentrum
Richard Bormann
Automatisierung der Speisentablettierung für Kliniken
Ausgangssituation
Für die Versorgung der Patienten in Krankenhäusern mit den einzelnen Mahlzeiten werden in den Zentralküchen der Service GmbH Schwarzwald verschiedenste Speisen anhand der Kundenwünsche vorportioniert und anschließend ausgeliefert.
Für die Mitarbeiter in diesen Zentralküchen besteht eine erhöhte körperliche Belastung durch monotone Tätigkeiten. Dadurch, aber auch begünstigt durch den demografischen Wandel der die verfügbaren Kapazitäten immer mehr verknappt, erschwert sich die Personalbeschaffung zunehmend. Dennoch müssen die Betriebssicherheit und die Versorgung von Kliniken mit Speisen gewährleistet werden.
Lösungsidee
Durch den Einsatz von Robotern und Methoden der KI soll zukünftig die Portionierung der Bestellungen teilweise automatisiert werden. Die auf einem Tablett zusammenzustellenden Speisen werden dabei durch Kundenbestellungen vorgegeben, vom System automatisch lokalisiert, aus dem entsprechenden Behälter gegriffen und sorgfältig abgelegt. Um eine autonome Ausführung zu ermöglichen, werden Verfahren zur Objekterkennung und (modellfreien) Greifplanung eingesetzt, basierend auf künstlichen neuronalen Netzen. Dies ermöglicht dem Roboter auch sich dynamisch an die Geschwindigkeit der menschlichen Kollegen anzupassen.
Nutzen
Durch die roboterbasierte Zusammenstellung der Speisen kann die Versorgung der Patienten mit Lebensmitteln sichergestellt werden, selbst wenn kein neues Personal eingestellt werden kann. Dabei bieten Robotersysteme den Vorteil flexibel an neue Aufgaben oder Sortimente anpassbar zu sein, was ebenfalls den langfristigen Einsatz in weiteren Einrichtungen und Bereichen ermöglicht. Die Robustheit dieser Systeme und eine niedrigere Fehlerquote als bei menschlicher Ausführung schaffen eine zusätzliche Planungssicherheit. Auch kann davon ausgegangen werden, dass die Hygienecompliance weiter verbessert werden kann, was einen zusätzlichen Sicherheitsstandard für die Patienten bildet.
Umsetzung der KI-Applikation
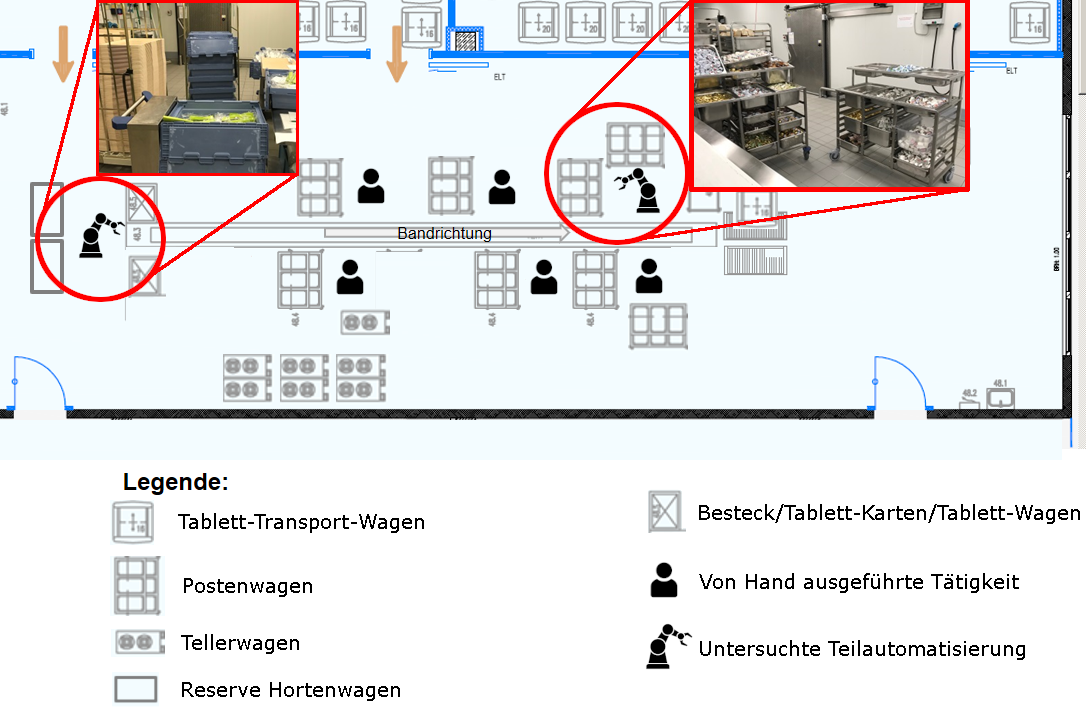
Die Tabletts werden an mehreren Stationen mit Speisen befüllt. Da die Lokalisierung und das autonome Greifen der Artikel an diesen unterschiedlich schwer sein können, wurden zuerst solche mit gutem Automatisierungspotential identifiziert. An beispielhaften Objekten (vorabgepackte Brotaufstriche und Joghurtbecher) wurden dann neuronale Netze zur Instanz-Segmentierung und modellfreien Greifpunktbestimmung getestet, die auch auf vorher nicht bekannte Objekte anwendbar sind. Ein 6-achsiger Roboterarm mit Sauggreifer konnte so die Objekte mit einer Erfolgsquote von 90% bei einer Berechnung des Greifpunktes innerhalb weniger Millisekunden zuverlässig greifen.