drag and bot GmbH
Kontakt am KI-Fortschrittszentrum
Anwar Al Assadi
Drag & Imitate – Menschzentrierte Roboterprogrammierung
Ausgangssituation
Bei der Automatisierung mit Robotern ist das exakte Positionieren des Roboters über das sogenannte »Teach-Panel« besonders zeitraubend. Die Nutzung dieser Panels ist dabei
zum einen wegen der genauen Positionierung zeitaufwändig, zum anderen erfordert es auch grundlegendes Wissen und Intuition über Themen der Robotik. Dies erschwert vielen Unternehmen den Zugang zur Robotik. Die Firma drag&bot beschäftigt sich seit geraumer Zeit mit der Vereinfachung des Programmierprozesses. Erklärtes Ziel ist es, die Bedienung des Roboters so einfach wie ein Smartphone zu gestalten. Deshalb suchen Expertinnen und Experten nach alternativen Möglichkeiten zur Programmierung von Positionen, die diese Hürde intuitiv umgehen können und damit Automatisierung für einen größeren Nutzerkreis verfügbar machen. Die am Fraunhofer IPA entwickelte Technologie »Programming-by-Demonstration« (PbD) ermöglicht Nutzenden, den betrachteten Prozess zu demonstrieren und damit das explizite Einprogrammieren von
Positionen zu umgehen. Durch Methodiken des Maschinellen Lernens können dabei intelligente Programme gelernt werden, die sich selbstständig an neue Situationen anpassen und robust gegenüber Störungen sind.
Lösungsidee
Da das PbD-System momentan beforscht wird, ist dessen Handhabung noch sehr unintuitiv und erfordert technisches Spezialwissen. Die Kombination von intuitiver Roboterprogrammierung zusammen mit PbD verspricht dabei, dass auch kleine und mittelständische Unternehmen und nicht-technisches Personal schnell und effizient intelligente Roboterprogramme erzeugen können.
Nutzen
Die Kombination aus dem Erlernen von intelligenten Programmen mit PbD/IL und der intuitiven Benutzeroberfläche von d&b ermöglicht jedem auch technisch nicht Vorgebildeten, künstliche Intelligenz für seinen Prozess zu nutzen. Einerseits kann dadurch der zeitraubenste Anteil an der Programmierzeit, das genaue Einprogrammieren von Positionen, verringert werden.
Andererseits ermöglicht diese Kombination die Nutzung von intelligenten Programmen und eine höhere Wiederverwendbarkeit der Programme, z. B. um Variantenvielfalt zu begegnen. Die Integration in die intuitive Benutzeroberfläche von d&b macht diese Technik für einen großen Nutzerkreis verfügbar und sichtbar.
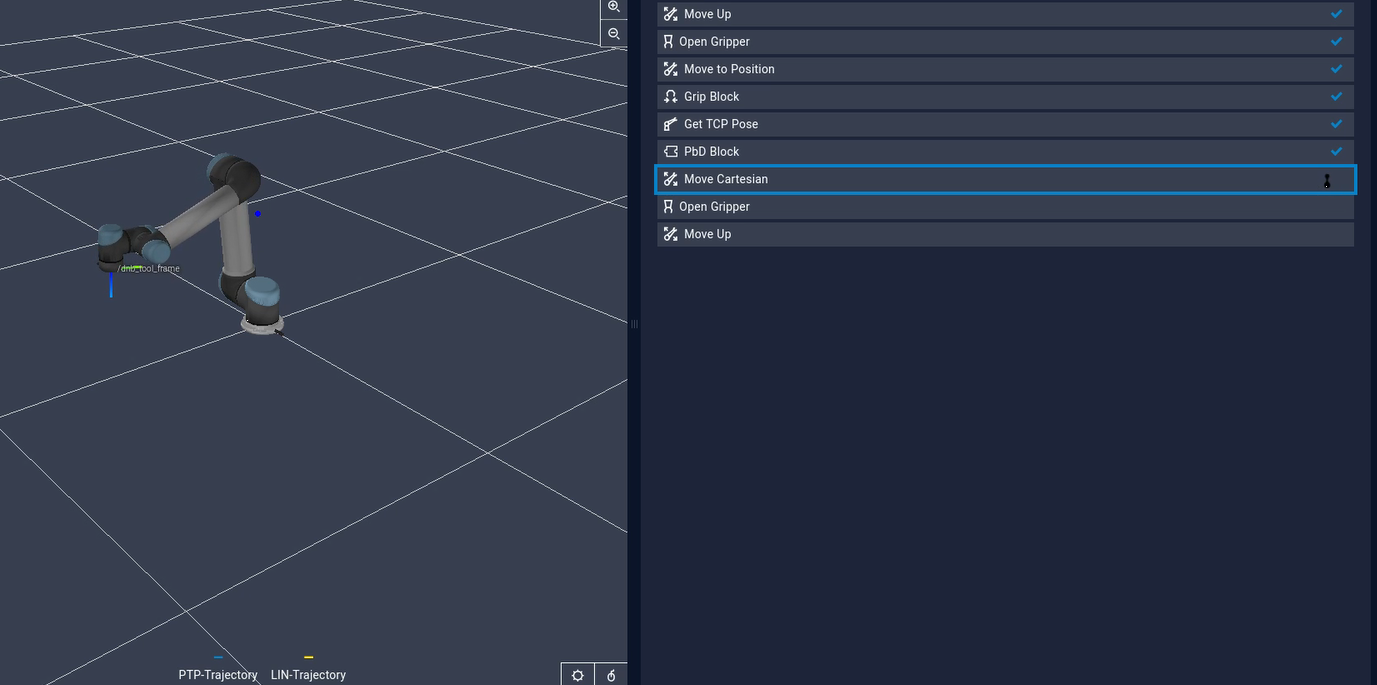
Umsetzung der KI-Applikation
Die am Fraunhofer IPA entwickelte Technologie »Imitation Learning« / »Programming-by-Demonstration« soll als parametrierbarer Programmbaustein in der drag&bot Umgebung umgesetzt werden. Dabei kann ein vorher demonstrierter Vorgang als Modell in einem drag&bot Programm eingebunden werden und passt sich zur Laufzeit kontextabhängig an die neue Situation an. Dieser Vorgang wurde an einem Pick&Place Beispiel, dem Stapeln von Legoblöcken, demonstriert.