Robert Bosch Manufacturing Solutions GmbH
Kontakt am KI-Fortschrittszentrum
Werner Kraus
Peg-Men: Flexible Bestückung unter Störgrößen
Ausgangssituation
Der Bestückungs- und Entnahmeprozess sensibler Ventilnadeln in Aufnahmen für die folgende Beschichtung ist eine zeitintensive und repetitive Tätigkeit, die aktuell nicht mit konventioneller Automatisierungstechnik (insbesondere Roboterprogrammierung) lösbar ist. Maßgeblich liegt dies an den zu beachtenden Toleranzen und Prozessungenauigkeiten sowie der mangelnden Flexibilität roboterbasierter Automatisierungslösungen. Aus diesem Grund ist die Programmierung von Industrierobotern aktuell nicht wirtschaftlich möglich.
Lösungsidee
Der zugrundeliegende Prozess ist vergleichbar mit einem klassischen Peg-in-Hole-Prozess, wie er bereits im Rahmen des Zentrums für kognitive Robotik erfolgreich flexibel umgesetzt wurde. Dafür erfolgt das Training unter Verwendung von Deep Reinforcement Learning in einer leistungsstarken Physiksimulation unter Variation der Prozessungenauigkeiten. Der Roboter erfasst seine Umgebung während des Trainings in der Simulation durch Einbindung der verwendeten Sensorik des realen Robotersystems in den digitalen Zwilling der Simulation. Durch Variation der Prozesseigenschaften wird dem Roboter eine robuste Ausführung des Fügeprozesses antrainiert.
Nutzen
Für die beteiligten Partner ist die praxisnahe Anwendung für aus der Simulation heraus generierte Steuerungsalgorithmen ein erster wichtiger Bestandteil des mittel- und langfristigen Ziels kognitiver Montagezellen. Die gezogenen Rückschlüsse aus den Realprozessen fließen direkt in die Technologieverbesserung des Konzepts selbstlernender, cyberphysischer Systeme ein.
Die Erkenntnisse zeigen das Potenzial der Kombination von maschinellem Lernen und Simulationstechniken mit dem Ziel der Automatisierung aktuell nicht automatisierbarer, repetitiver Tätigkeiten, um den Menschen zu entlasten.
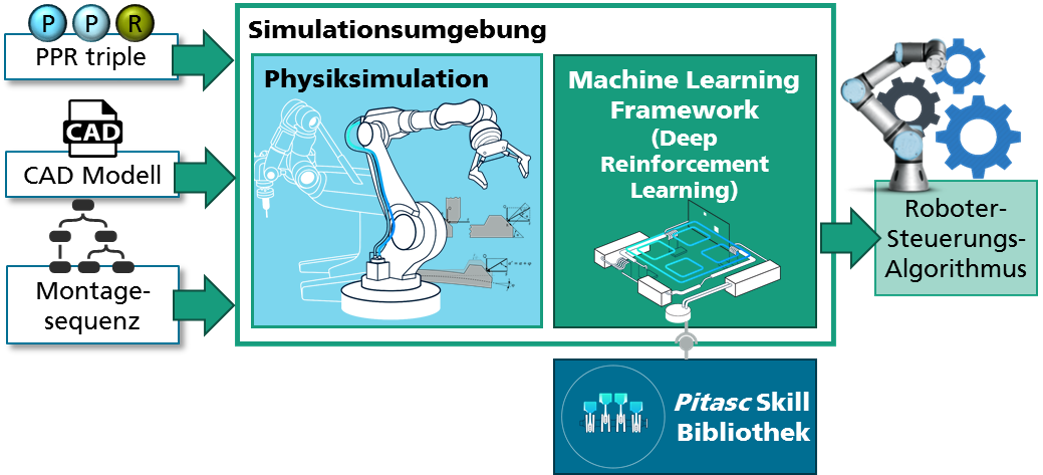
Umsetzung der KI-Applikation
Für das Training der Roboter-Steuerungs-Algorithmen wird der zugrundeliegende Montageprozess im digitalen Zwilling der Anlage abgebildet. Dazu werden sowohl der Roboter mit seinem Greifer als auch die verwendeten Bauteile digital modelliert. Für das eigentliche Training variiert der Lernalgorithmus die Parameter des Roboterprogramms situationsabhängig und erhält dafür eine Belohnung oder Bestrafung, je nachdem ob er seinem Ziel nähergekommen ist oder nicht. Um den möglichen Lösungsraum
zu begrenzen und das Training zu beschleunigen, findet die Skill-Programmierung pitasc für den Roboter Anwendung.