E+H Gross GmbH
Kontakt am KI-Fortschrittszentrum
Werner Kraus
RoboJudge: Erfolgreiche Prozessausführung mit KI
Ausgangssituation
Die Schaltschrankmontage ist aufgrund der hohen Anzahl an Produktvarianten und Toleranzen mit konventioneller Automatisierung nahezu nicht realisierbar, obwohl das Potenzial sehr hoch ist. Einer der Hauptgründe ist der Zeitaufwand für die Roboterprogrammierung, der zumeist die Zeit für eine rein manuelle Montage überschreitet. Der Einsatz von wiederverwendbaren Roboter-Skills bietet eine vielversprechende Möglichkeit zur Automatisierung, auch in Kombination mit Trainingsverfahren der KI. Allerdings können die Roboter-Skills nicht erfassen, ob der Gesamtprozess erfolgreich durchgeführt wurde oder nicht, weshalb dieser manuell um spezialisierte Erfolgskriterien erweitert werden muss.
Lösungsidee
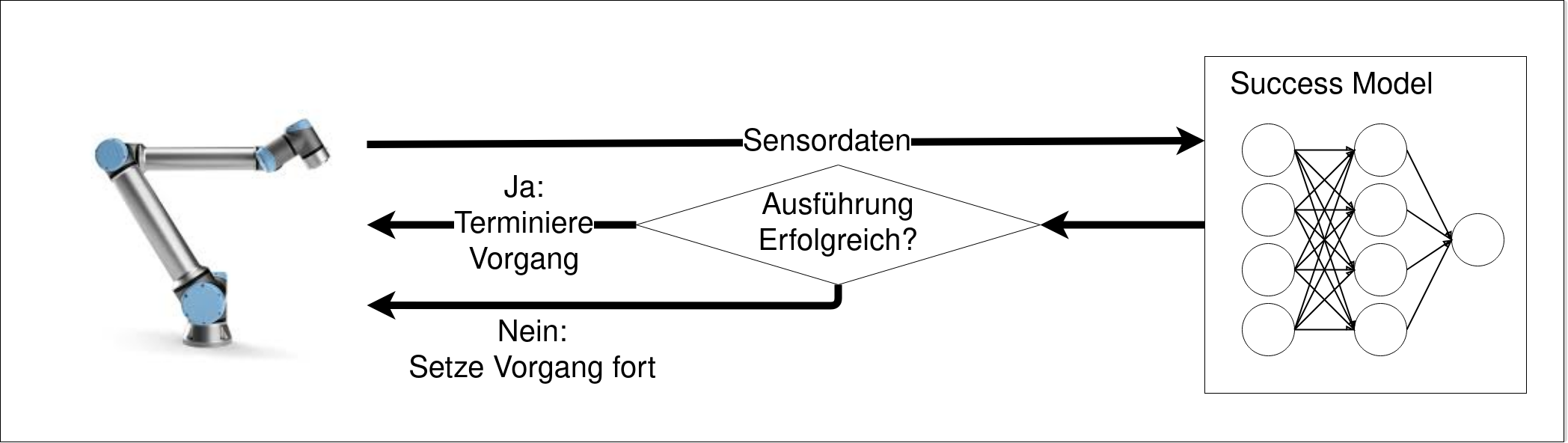
Insbesondere für die Programmierung flexibler Montageprozesse wird die Kombination von Methoden der künstlichen Intelligenz mit fortschrittlichen Simulationswerkzeugen intensiv erforscht. Während der Prozessausführung in der Simulation kann der Fortschritt und Erfolg des Roboters genau beobachtet werden. Die Beobachtungen werden genutzt, um prozessspezifische Erfolgskriterien per Supervised Learning zu trainieren. Diese betreffen beispielsweise auftretende Kräfte während der Montage sowie Positionen und Geschwindigkeiten des Roboters und der Bauteile. Die trainierten »Success Models« dienen als Erfolgskriterien, um den realen Prozess kontinuierlich zu erfassen und bewerten zu können.
Nutzen
Für das Training kognitiver Roboter spielt die Erfassung des Prozessfortschritts und -erfolgs eine wichtige Rolle. Um die aufwändig manuell erstellten Erfolgskriterien zu verbessern oder automatisch generieren zu lassen, werden aus der Simulation heraus »Success Models« trainiert, um den Roboter bei der erfolgreichen Prozessausführung anzuleiten. Die trainierten Modelle liefern einen erheblichen Nutzen für das simulative Training von Montageprozessen mittels künstlicher Intelligenz und damit für das Ziel der Automatisierung aktuell nicht automatisierbarer Tätigkeiten in der Schaltschrankmontage.
Umsetzung der KI-Applikation
Die Programmierung des Roboters findet offline in einer leistungsstarken, realitätsnahen Physiksimulation statt. Innerhalb der Simulation kann – im Gegensatz zur Realität – der Systemzustand zu jedem Zeitpunkt vollständig bestimmt werden, so auch der aktuelle Erfolg des Roboters. Während der Roboter in der Simulation mittels »Versuch und Irrtum« trainiert wird, beobachtet das »Success Model« den Zustand des Roboters genau. Abhängig von dessen Position im Raum, der wirkenden Kräfte und weiterer Interaktion mit der Umgebung bestimmt das Modell einen Erfolgswert. Dieser Wert gibt anschließend abhängig vom beobachteten Systemzustand an, ob der Roboter sein Ziel erreicht hat oder nicht.