»In our collaboration with Fraunhofer IPA, we focused on investigating technologies that are not available to us. With the wealth of technical possibilities and experience that the IPA has, we made rapid progress despite the short time available and were able to clarify our key questions. Through regular exchanges, we combined our domain knowledge and the IPA's technological expertise, which was key to the project. But apart from all that, the collaboration was above all fun.«
Dr. Christof Strohhöfer - CTO
Polysecure GmbH
Contact at the AI Innovation Center
Richard Bormann
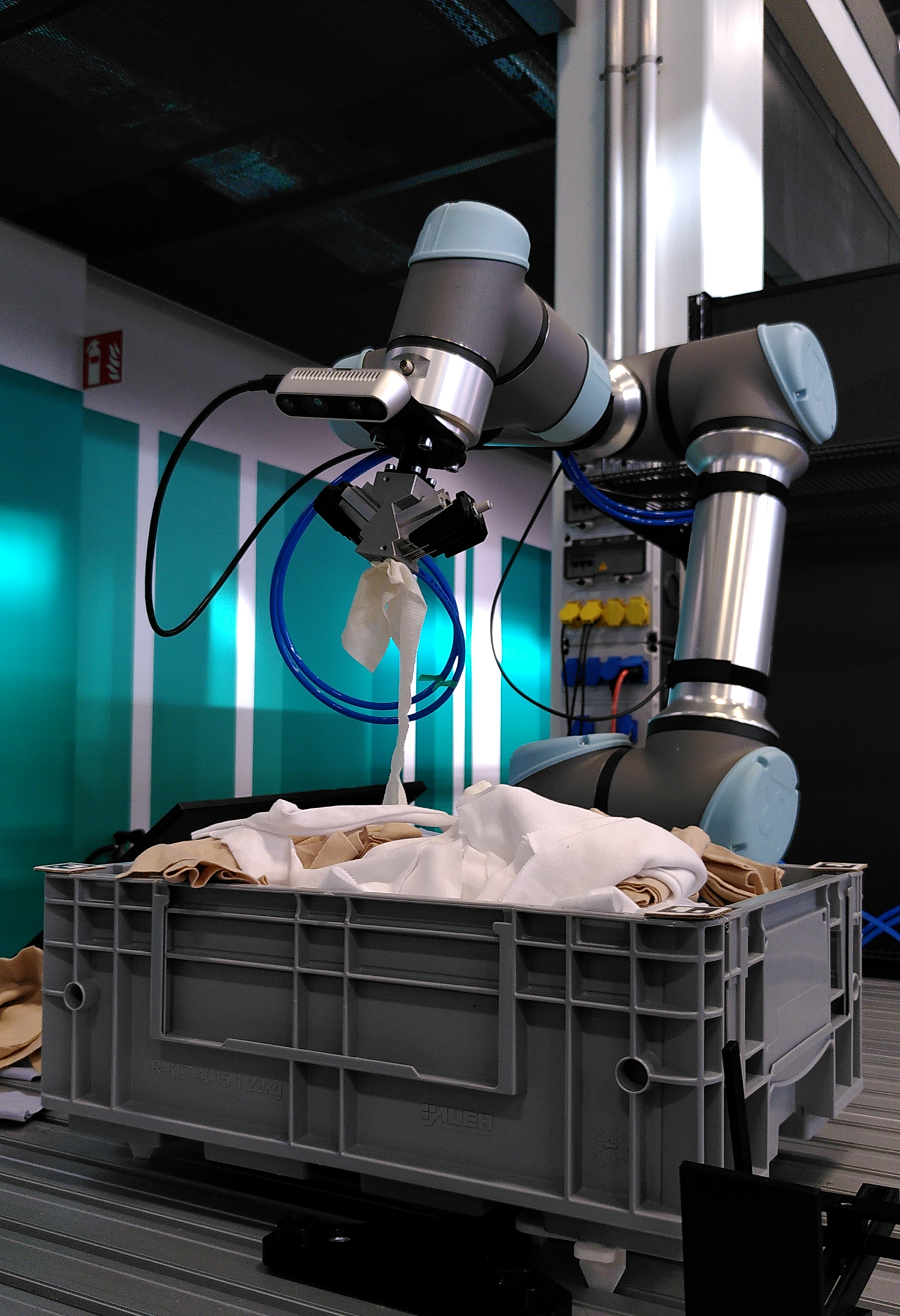
TextilPick – Singulation of Used Textiles Using Robots for Textile Recycling
Initial situation
The textile industry is facing a huge upheaval: since 2025, the separate collection of used textiles has been mandatory in the EU and the EU textile strategy calls for durable, repairable, recyclable products with a high recycled fiber content and without harmful substances that are also produced fairly from 2030. This increases both the amount of used textiles to be sorted and the demand for well-sorted textile fibers. However, there is a lack of industry-compatible solutions for reliable identification/sorting. Without these, however, the sustainability targets set remain unattainable, which is why they must continue to develop in line with the increased requirements.
The first step in sorting is to feed the textiles into a sorting system in order to divide them into fabric fractions. Manual feeding by workers dominates the market. However, in view of the expected increase in the volume of textiles to be sorted and the shortage of labor, this is not sustainable. The solution lies in the full automation of textile feeding.
Solution idea
One possible solution is the use of gripper robots. At the heart of this is an end effector that can recognize and robustly grip individual pieces of textile in a chaotic feed. However, fundamental questions need to be answered: Which gripping mechanisms can safely pick up and place textiles and at the same time offer the best options for fine control, for example in terms of gripping position, area and force? In addition, AI-based control must be included in the future so that incorrect and multiple grips can be avoided. It also needs to be clarified which technologies are required to identify individual textile items or suitable gripping points, even with unknown textiles.
Implementation of the AI application
For robotic separation, a model-free gripping planner identifies the most stable gripping point possible using depth data optimized for the application. A 2-finger gripper, needle gripper and volume flow gripper were each integrated into a robot cell and tested for their suitability for the task. Finally, the gripping and separation rate was determined for each gripper. A high gripping and separation rate was achieved without any adjustments to the algorithms, which validated the feasibility of the application. In the course of the work, potentials were identified to further improve the performance of the system.