»Für uns stand in der Zusammenarbeit mit dem Fraunhofer IPA im Vordergrund, Techniken zu untersuchen, die uns nicht zur Verfügung stehen. Bei der Fülle an technischen Möglichkeiten und Erfahrungen, die das IPA besitzt, kamen wir trotz der kurzen Zeit schnell voran und konnten unsere wesentlichen Fragen klären. Im regelmäßigen Austausch brachten wir unser Domänenwissen und das IPA seine Technologiekompetenz zusammen, was zum Schlüssel für das Projekt wurde. Aber neben all dem – die Zusammenarbeit hat vor allem Spaß gemacht.«
Dr. Christof Strohhöfer – CTO
Polysecure GmbH
Contact at the AI Innovation Center
Richard Bormann
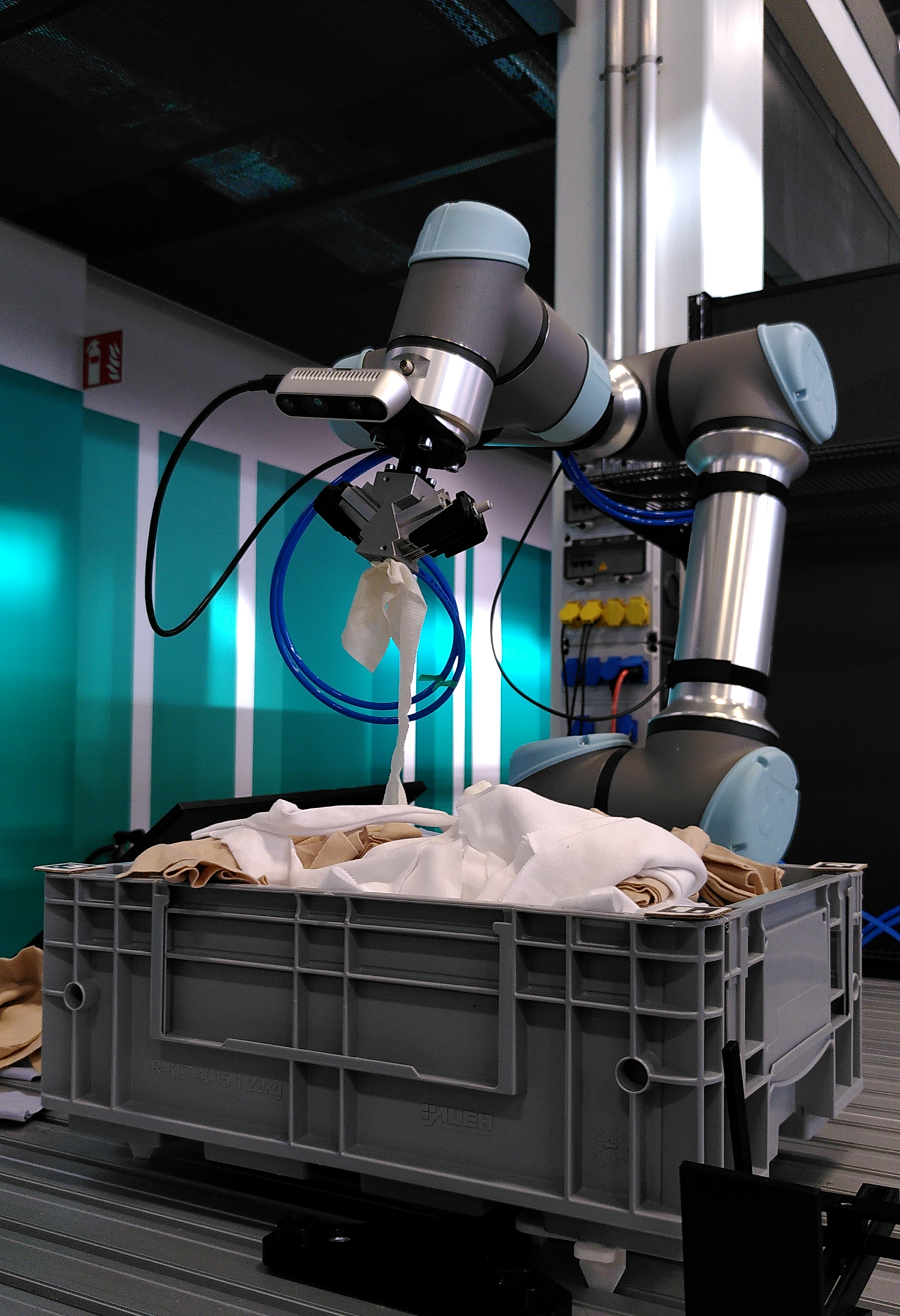
TextilPick – Singulation of Used Textiles Using Robots for Textile Recycling
Initial situation
Die Textilindustrie steht vor einem gewaltigen Umbruch: Seit 2025 gilt in der EU die Pflicht zur Getrenntsammlung von Alttextilien und die EU-Textilstrategie fordert ab 2030 langlebige, reparierbare, recycelbare Produkte mit hohem Recyclingfaseranteil und ohne Schadstoffe, die gleichzeitig fair produziert sind. Dadurch steigt sowohl die Menge an zu sortierenden Alttextilien als auch die Nachfrage nach gut sortierten Textilfasern. Jedoch fehlen industrietaugliche Lösungen zur zuverlässigen Identifikation/Sortierung. Ohne diese bleiben die gesetzten Nachhaltigkeitsziele aber unerreichbar, weswegen sie sich den gesteigerten Anforderungen entsprechend weiterentwickeln müssen.
Der erste Schritt bei einer Sortierung ist die Zuführung der Textilien in eine Sortieranlage, um sie in Stofffraktionen einzuteilen. Auf dem Markt dominiert die manuelle Zuführung durch Arbeitskräfte. Angesichts des erwarteten Anstiegs der zu sortierenden Textilmenge und des Arbeitskräftemangels, ist dies jedoch nicht zukunftsfähig. Die Lösung liegt in einer Vollautomatisierung der Textilzuführung.
Solution idea
Eine mögliche Lösung ist der Einsatz von Greifrobotern. Kern ist dabei ein Endeffektor, der einzelne Textilstücke in chaotischer Andienung erkennen und robust greifen kann. Dafür sind jedoch grundlegende Fragen zu klären: Welche Greifmechanismen können Textilien sicher aufnehmen und ablegen und bieten gleichzeitig die besten Möglichkeiten zur Feinsteuerung, etwa in Bezug auf Greifposition, -fläche und -kraft? Zudem muss perspektivisch eine KI-basierte Steuerung einbezogen werden, damit eigenständig Fehl- und Mehrfachgriffe vermieden werden. Ebenso ist zu klären, welche Technologien erforderlich sind, um einzelne Textilstücke bzw. geeignete Zugriffspunkte auch bei unbekannten Textilien zu identifizieren.
Implementation of the AI application
Für die robotische Vereinzelung identifiziert ein modellfreier Greifplaner anhand auf die Anwendung optimierter Tiefendaten einen möglichst stabilen Greifpunkt. Jeweils ein 2-Finger-, Nadel- und Volumenstromgreifer wurden in eine Roboterzelle integriert und auf ihre Eignung für die Aufgabe getestet. Abschließend wurde je Greifer die Greif- und Vereinzelungsquote ermittelt. Ohne Anpassungen der Algorithmik konnte eine hohe Greif- und Vereinzelungsquote erreicht werden, was die Umsetzbarkeit der Anwendung validierte. Im Zuge der Arbeiten wurden Potenziale identifiziert, um die Leistungsfähigkeit des Systems weiter zu verbessern.