Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«Quick Check
Ausgangssituation
Adaptive Cruise Control (ACC) Systeme passen die Fahrzeuggeschwindigkeit an vorausfahrende Fahrzeuge, die aktuellen Verkehrsschilder, Kurven, die Straßengriffigkeit und andere Faktoren an. Zudem werden zukünftig viele Daten aus dem Fahrzeuginnenraum über die Insassen verfügbar sein. In diesem Projekt prüfen Fraunhofer IAO und INVENSITY GmbH, ob zukünftige ACC die Geschwindigkeit des Fahrzeugs und den Abstand zum vorausfahrenden Fahrzeug auch (als zusätzliche Stellgröße) an den Fahrerzustand anpassen können.
Lösungsidee
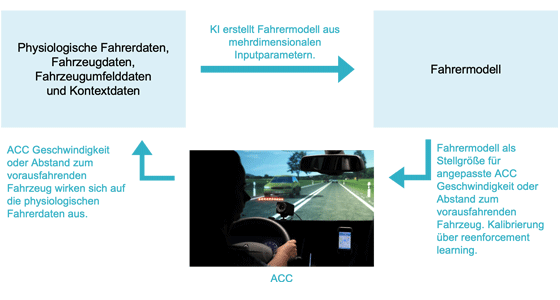
In einem KI-Ansatz sollen Daten aus dem Innenraum genutzt werden um Fahrerzustände zu erkennen und in Fahrermodellen abzubilden (Bspw. Stress, Workload, Flow, Aufmerksamkeit, Intentionen, Emotionen). Die KI erkennt Muster in den verfügbaren Innenraumdaten sowie anderen multidimensionalen Daten und klassifiziert diese zu Fahrermodellen. Ein ACC passt dabei die Geschwindigkeit oder den Abstand zum vorausfahrenden Fahrzeug in vorgegebenen Grenzen an die Fahrerzustände an. Dadurch entsteht ein Regelkreis in dem eine KI lernt, welche Geschwindigkeit, welcher Abstand, ggf. auch welche Musik, Lichtszenarien, Fahrdynamiken, die Fahrerzustände in den optimalen Zielgrößen einregeln. Über Reinforcement Learning regelt die KI die fahrerzustandsadaptive Geschwindigkeit.