Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«Quick Check
Ausgangssituation
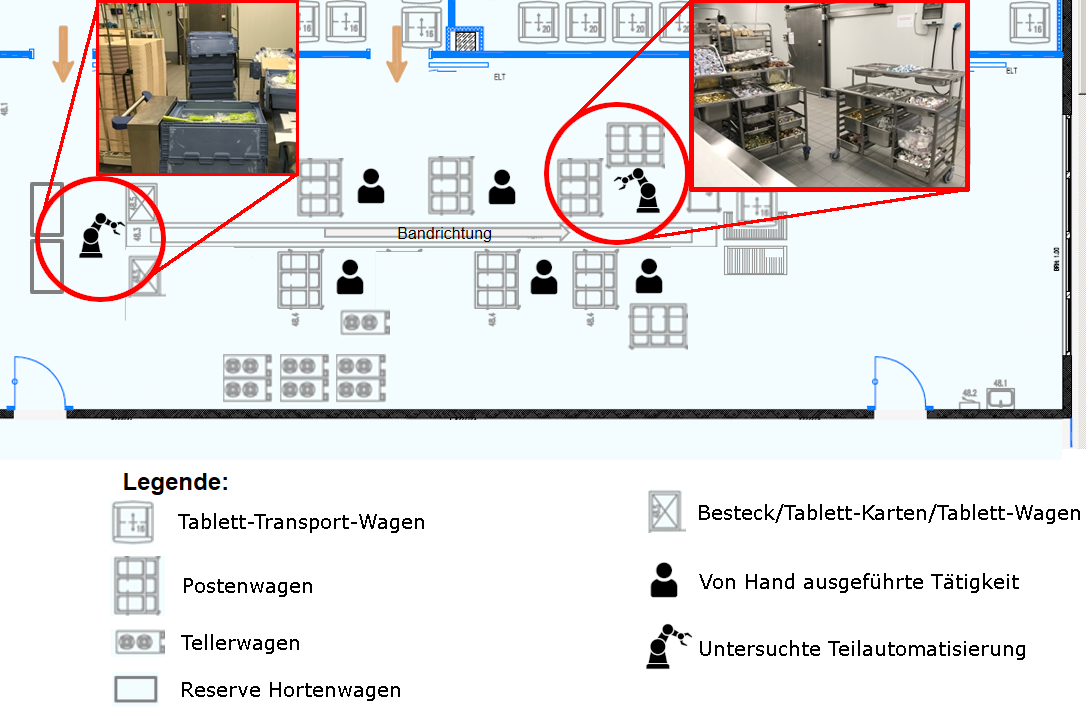
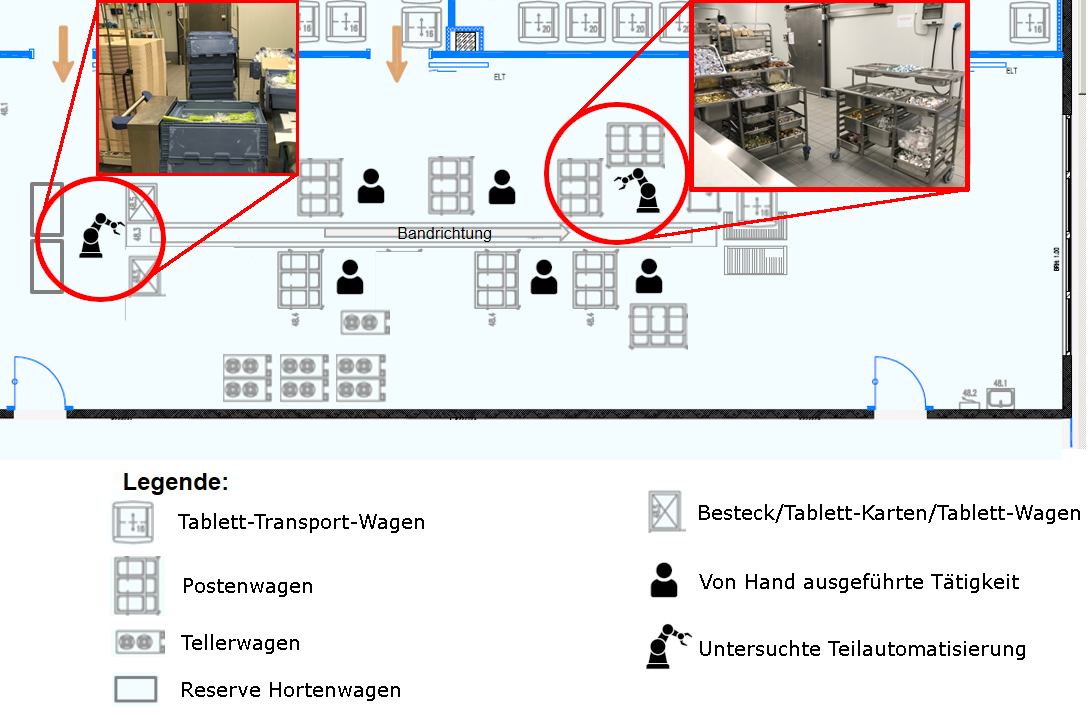
Für die Versorgung der Patienten in Krankenhäusern mit den einzelnen Mahlzeiten werden in den Zentralküchen der Service GmbH Schwarzwald verschiedenste Speisen anhand der Kundenwünsche vorportioniert und anschließend ausgeliefert.
Für die Mitarbeitenden in diesen Zentralküchen besteht eine erhöhte körperliche Belastung durch monotone Tätigkeiten. Dadurch, aber auch begünstigt durch den demografischen Wandel, der die verfügbaren Kapazitäten immer mehr verknappt, erschwert sich die Personalbeschaffung zunehmend.
Lösungsidee
Durch den Einsatz von Robotern und Methoden der KI soll zukünftig die Portionierung der Bestellungen teilweise automatisiert werden. Die auf einem Tablett zusammenzustellenden Speisen werden dabei durch Kundenbestellungen vorgegeben, vom System automatisch lokalisiert, aus dem entsprechenden Behälter gegriffen und sorgfältig abgelegt. Um eine autonome Ausführung zu ermöglichen, werden Verfahren zur Objekterkennung und Greifplanung eingesetzt, basierend auf künstlichen neuronalen Netzen. Dies ermöglicht dem Roboter auch, sich dynamisch an die Geschwindigkeit der menschlichen Kolleg*innen anzupassen.