Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«Quick Check
Ausgangssituation
robomotion entwickelt Produktions- und Verpackungsmaschinen, die eine Vielzahl unterschiedlicher Produkte zielgerichtet handhaben müssen. Die Picksysteme werden hier für jedes zu handhabende Produkt individuell programmiert. Insbesondere die Objekt- und Lageerkennung bedarf dabei einer Programmierung durch Expertinnen und Experten, die geeignete Bildmerkmale für die Erkennung auswählen. Aufgrund kleinerer Losgrößen, steigender Produktvielfalt und Flexibilitätsanforderungen ist jedoch eine Umprogrammierung für jedes neue Produkt nicht immer wirtschaftlich.
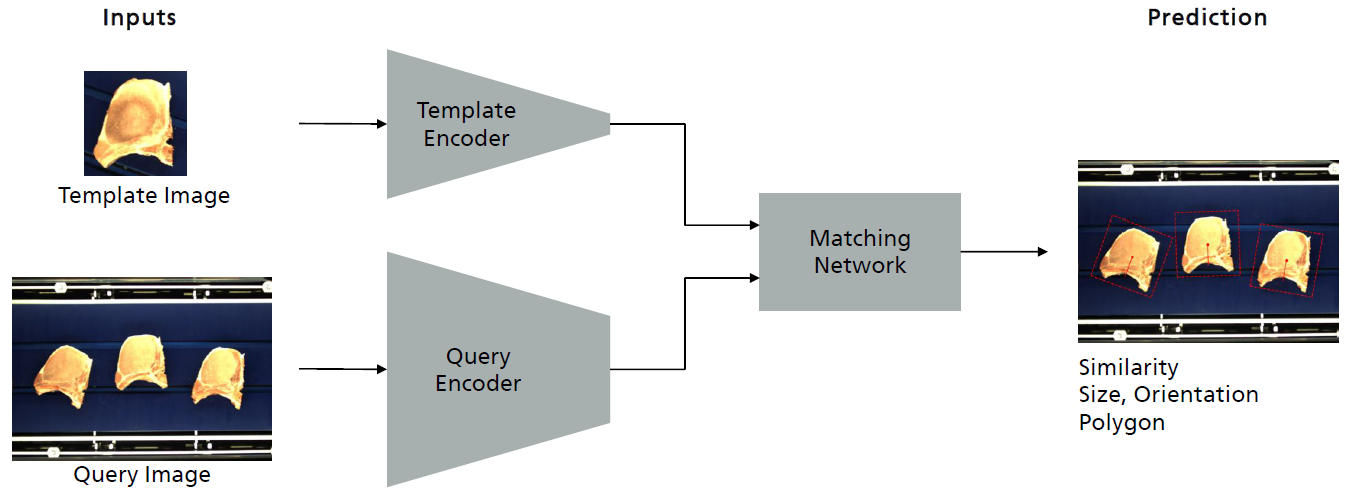
Lösungsidee
Die Programmierung der Objekt- und Lageerkennungssoftware soll nun mittels Methoden des Maschinellen Lernens automatisiert werden. Darüber hinaus soll die Objekterkennung auch mehrere Produkttypen in gemischten Anlagen unterscheiden können und es ermöglichen, weitere neue Produkte ohne großen Trainingsaufwand hinzuzufügen. Sie muss daher in der Lage sein, die jeweils passenden Erkennungsmerkmale für verschiedene Produkte selbst zu erlernen.