Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«Ausgangssituation
Im Logistikzentrum der HAHN+KOLB Werkzeuge GmbH sind kleine und kleinste Produkte mit unterschiedlichen Abmessungen, Oberflächen und Lagerzuständen zu kommissionieren. Die Kommissionierung geschieht derzeit an manuellen Kommissionierplätzen. Marktreife Automatisierungslösungen benötigen meistens ein 3D-Modell des zu greifenden Objekts und sind aufgrund der Artikelvielfalt nicht anwendbar.
Dennoch besteht in der Automatisierung der Kommissionierung in Hochlohnstandorten hohes Potenzial.
Lösungsidee
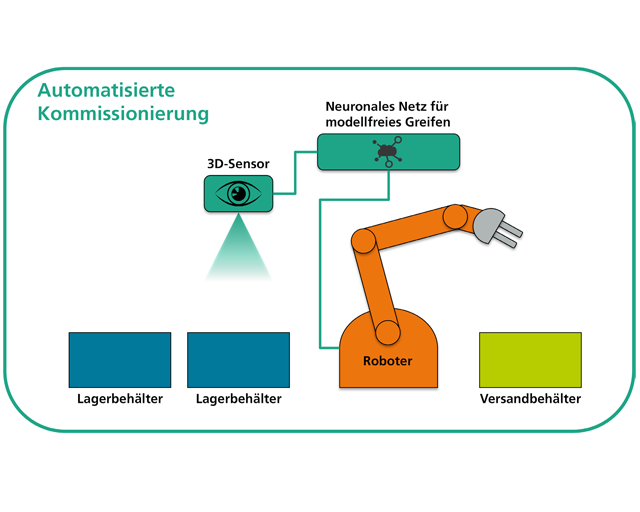
Die Kommissionierung von Produkten soll nun durch einen Roboter mittels geeigneten Greifern und einem Bildverarbeitungssystem automatisiert werden. Hierfür soll das Bildverarbeitungssystem die im Lagerbehälter befindlichen Produkte mittels Form-, Farb- oder Texturerkennung ohne ein zugrunde liegendes 3D- bzw. 2D-Textur-Modell differenzieren.
Zusätzlich muss eine Klassifizierung erfolgen, da Produkte zum Teil verpackt sind oder lose gelagert werden. Sind die Produkte nach Verpackung bzw. nach einzelnen Artikeln differenziert, könnte ein Roboter die gewünschte Anzahl aus dem Behälter greifen und im Warenausgangsbehälter ablegen.