Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«Quick Check
Ausgangssituation
Der Bestückungs- und Entnahmeprozess sensibler Ventilnadeln in Aufnahmen für die folgende Beschichtung ist eine zeitintensive und repetitive Tätigkeit, die aktuell nicht mit konventioneller Automatisierungstechnik lösbar ist. Maßgeblich liegt dies an den zu beachtenden Toleranzen und Prozessungenauigkeiten sowie der mangelnden Flexibilität roboterbasierter Automatisierungslösungen.
Lösungsidee
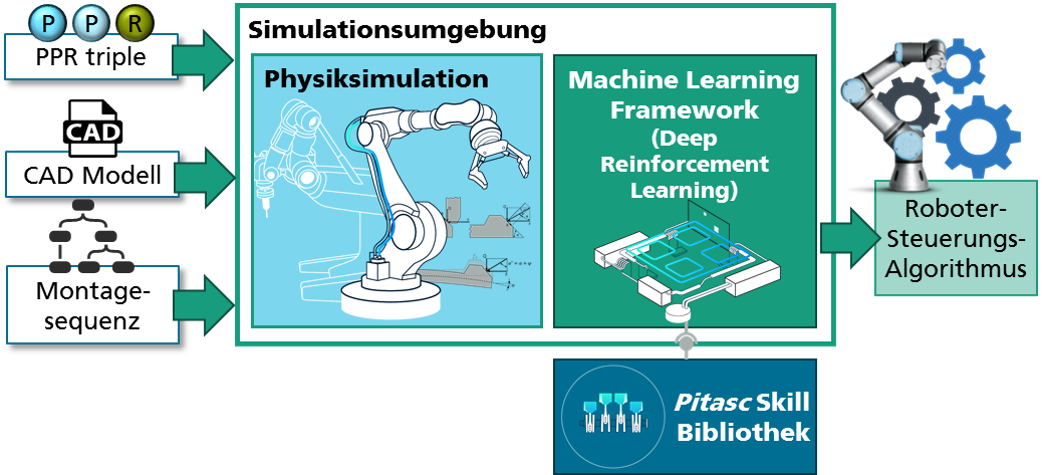
Der zugrundeliegende Prozess ist vergleichbar mit einem klassischen Peg-in-Hole-Prozess. Dafür erfolgt das Training unter Verwendung von Deep Reinforcement Learning in einer leistungsstarken Physiksimulation unter Variation der Prozessungenauigkeiten. Der Roboter erfasst seine Umgebung während des Trainings in der Simulation durch Einbindung der verwendeten Sensorik des realen Robotersystems in den digitalen Zwilling der Simulation. Durch Variation der Prozesseigenschaften wird dem Roboter eine robuste Ausführung des Fügeprozesses antrainiert.