Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«Ausgangssituation
Für Messfahrten, welche zu Datenerfassungstests für Sensor-Erprobungen durchgeführt werden, benötigt man den Kontext bzw. ein Label für die erfassten Szenen.
Dieser Labelingprozess ist äußerst aufwendig, da hier zugrundeliegende Datensätze meist in der Größenordnung von Zehntausenden liegen. Gleichzeitig sind auch die Kosten für manuelles Labeling hoch. Eine weitere Schwierigkeit liegt darin, dass die Daten und deren zugehörige Labels sehr aufgabenspezifisch sind. Obwohl Transferlernen angewandt werden kann, werden immer noch große Datenmengen benötigt.
Lösungsidee
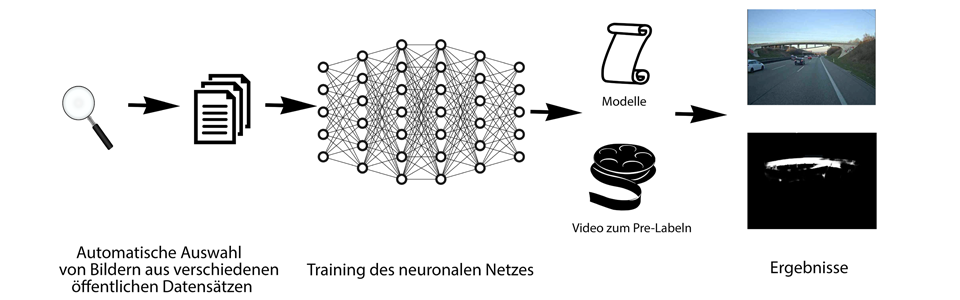
Um den Labelingprozess zeit- und kostentechnisch effizienter zu gestalten, soll ein automatisches Pre-Labeling-System entwickelt werden, welches in der Lage ist, eine Voreinteilung der aufgenommenen Daten vorzunehmen.
Auf Basis von öffentlich verfügbaren, bereits gelabelten Bildern aus dem Internet sollen KI-Modelle trainiert werden, mit welchen sich zuverlässige Ergebnisse für das Labeling von bestimmten Situationen bzw. Objekten, wie z. B. Brücken, erzielen lassen.