Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«Ausgangssituation
Die Software »ISG-virtuos« bietet eine Simulationsplattform für den gesamten Lebenszyklus einer Automatisierungslösung - vom Vertrieb über das digitale Engineering bis in die Betriebsphase.
»ISG-virtuos« erlaubt es, virtuelle Anlagenmodelle und Steuerungen schnell und einfach in einen Ablauf einzubinden. Bislang sind hier jedoch keine externen oder cloudbasierten Steuerungen wie beispielsweise autonome Fahrerlose Transportsysteme (FTS) oder intelligente Robotersteuerungen verfügbar.
Lösungsidee
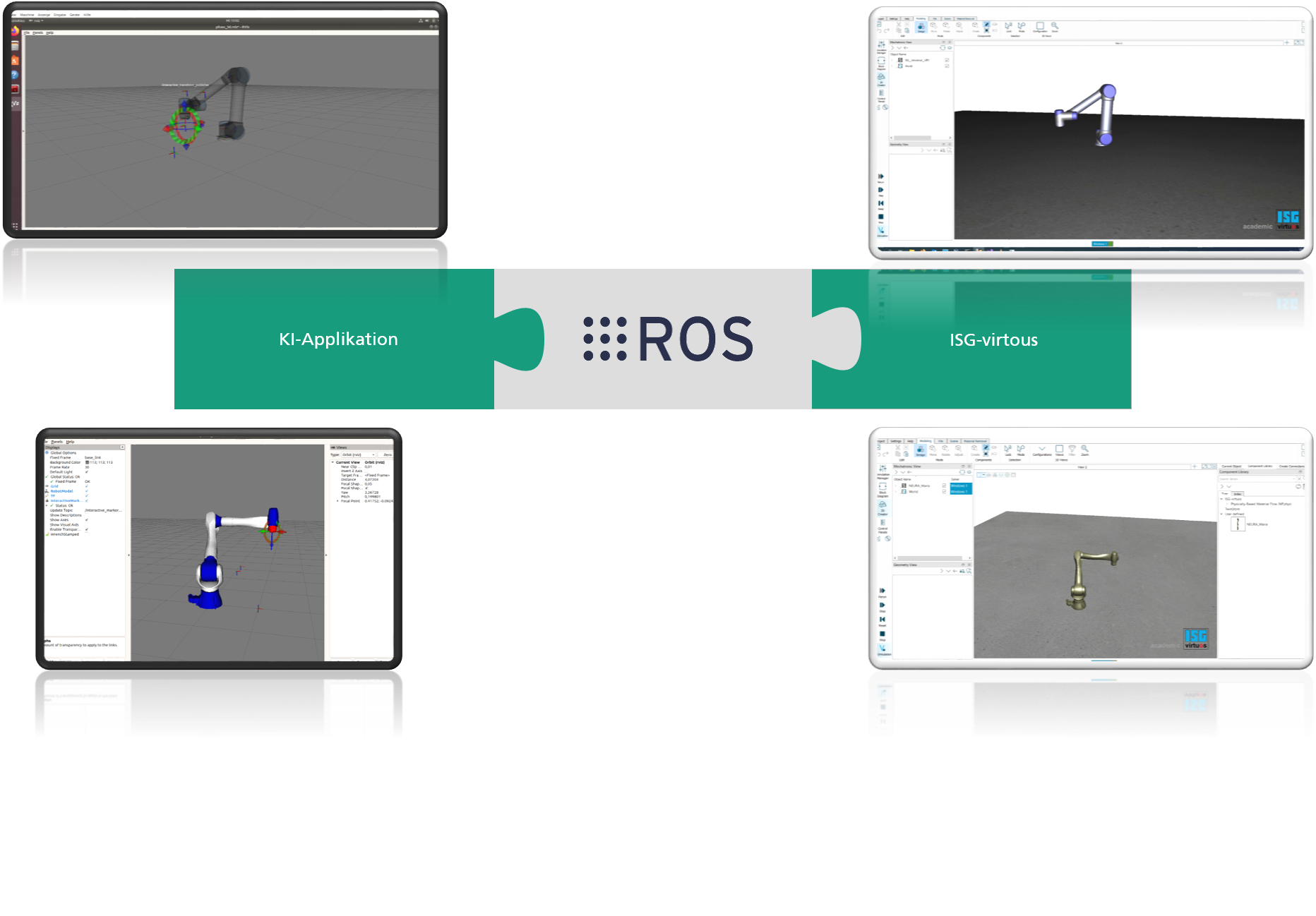
Ziel des Projektes ist es, ROS-basierte Steuerungen in das Simulationstool »ISG-virtuos« einzubinden.
Hierdurch steht den Nutzenden ein einfacher Zugang zu intelligenten Komponenten und autonomen Systemen in ihrem (virtuellen) Fabrikablauf zur Verfügung. Cloud-Services und komplexe KI-Steuerungen können so bereits während des Entwicklungsprozesses und der virtuellen Inbetriebnahme einbezogen und im Gesamtkontext der virtuellen Fabrik erprobt werden.